
Maximum manufacturing operations in automotive industries are none the less largely dependent on experience-based human choices. The emergence of huge information, alongside gadget learning in automotive organizations, has paved a manner this is assisting covey operational and commercial enterprise variations, thereby leading to an increased degree of accuracy in choice making and advanced overall performance.
The car industry keeps facing a dynamic set of demanding situations. Transferring market conditions, extended competition, globalization, price stress and vitality are main to an alternate in the marketplace landscape. Self-driving motors and changing usage fashions have heightened client expectations. It is pointless to mention that the automotive industry is getting ready to a revolution. One vicinity that has demonstrated an opportunity to supply substantial aggressive benefit is analytics. The car is getting transformed by means of technologies. AI and system learning algorithms have found a growing degree of applicability in this industry. The collaboration of big information analytics and device gaining knowledge of has boosted potential to system massive volumes of facts, thereby accelerating growth of AI structures. Gadget studying in automobile industry has an amazing capability to carry out hidden relationships among facts units and make predictions.
Introduction
One of the most thrilling era breakthroughs inside the previous few years has been the upward push of deep studying. Ultra-modern deep mastering models are being widely deployed in academia and enterprise, across a spread of areas, from photo evaluation to herbal language processing. These models have grown from Fledgling research topics to mature strategies in real-global use.
The growing scale of records, computational Strength and the associated algorithmic improvements are the main drivers for the development we see in this field. Those traits actually have a huge potential for the automobile industry and therefore the hobby in deep Master-ing-based technology is growing. Lots of the product improvements, inclusive of self-using motors, parking and Lane-alternate assist or protection functions, which includes autonomous emergency braking, are powered by deep studying Algorithms. Deep mastering is poised to provide profits in overall performance and functionality for maximum ADAS (advanced driver assistance machine) solutions. Virtual sensing for automobile dynamics software, vehicle Inspection/heath tracking, automatic riding and records-driven product development are key regions which might be anticipated to get the most attention. This text gives an overview of the recent advances and some related challenges in deep learning techniques in the context of automobile packages.
Statement of the problem: Autonomous vehicle test and development
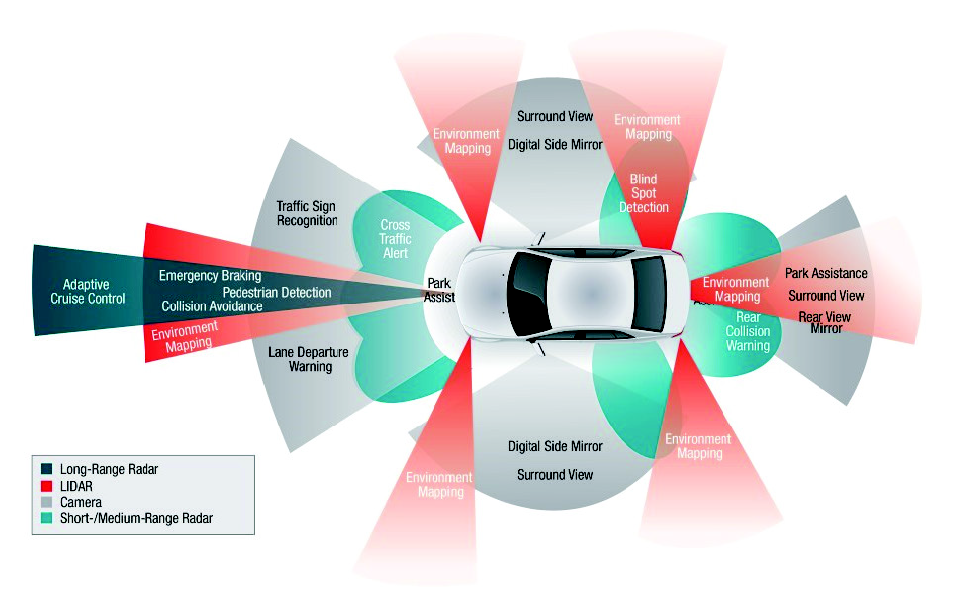
A self-driving automobile, additionally known as an self-sufficient automobile (AV), related and autonomous car (CAV), driverless vehicle, robo-vehicle, or robotic automobile, is a car this is capable of sensing its surroundings and moving effectively with little or no human enter. Self-using cars combine a selection of sensors to perceive their environment, such as radar, lidar, sonar, GPS, odometry and inertial measurement gadgets. Advanced control systems interpret sensory data to identify suitable navigation paths, as well as limitations and applicable signage. Long-distance trucking is visible as being at the leading edge of adopting and enforcing the generation.
From voice assistants to self-riding automobiles, deep studying (DL) Is redefining the manner we engage with machines. DL has been Capable of reap breakthroughs in historically hard areas Of machine gaining knowledge of along with textual content-to-speech conversion, Image category, and speech reputation. DL commonly Refers to a category of models and algorithms primarily based on deep Artificial neural networks (ANN). Perceptron, the building Block of an ANN was first presented within the Fifties. ANNs had been a chief area of research in each neuroscience and laptop science till the late 1960s and the approach Then enjoyed a resurgence in the mid-1980s. At Bell Labs, Yann Le-Cun developed several DL algorithms within the Past due Eighties, together with the convolutional neural network (CNN). Pioneering deep neural networks via Yann Le-Cun ought to classify handwritten digits with properly speed and Accuracy and have been extensively deployed to read over 10% of all the cheques inside the U.S. inside the late 1990s and early 2000s. Even though the primary theories associated with ANN have existed because Nineteen Fifties, the field of DL has matured loads in the ultimate Decade and changed loads in the previous few years. The “deep” in Deep studying is not a connection with any kind of deeper Information accomplished through the approach; as a substitute, it stands for the many layers inside the neural community that contribute to a Version of the records.
There are 4 key factors that are riding the devel-opment and uptake of DL.
- Extra Compute energy: e.g., Photographs processing unit (GPUs), tensor processing unit (TPUs) and so on.
- Prepared large Datasets: e.g., Image Net and so forth.
- Higher Algorithms: e.g., Activation features like RELU, optimization schemes and so forth.
- Software & Infrastructure: e.g. Git, robot operating System (ROS) , Tensor Flow [9], karas and so on.
Significance of the study: Perception systems for object detection
The belief system of a self-reliant car is answerable for mapping sensor observations into a semantic Description of the automobile’s surroundings. 3D item detects a common feature inside this gadget and outputs a listing of 3-D bounding boxes around gadgets of interest. Diverse 3-D Object detection techniques have depended on fusion of different Sensor modalities to conquer barriers of person sensors. However, occlusion, limited subject-of-view and low-factor density of the sensor facts cannot be reliably and value-correctly addressed through multi-modal sensing from a single factor of view. Alternative-ly, Cooperative belief car-ries information from spatially various sensors distributed across the surroundings as a manner to mitigate those obsta-cles. This paper proposes two schemes for coopera-tive three-D item detec-tion. The early fusion scheme combines point clouds from a couple of spatially diverse sensing factors of view before detection.
In assessment, the late fusion scheme fuses the independently envisioned bounding boxes from more than one spatially diverse sensors. We evaluate the performance of each schemes using an artificial cooperative dataset created in two complicated using scenarios, a T-junction and a roundabout. The evalua-tion show that the early fusion approach outperforms overdue fusion via a good-sizedmargin at the fee of better communication bandwidth. The outcomes demonstrate that cooperative belief can consider greater than ninety-five% of the items as antagonistic to 30% for unmarried-point sensing within the maximum challenging scenario to offer practical insights into the deployment of such device, we document how the variety of sensors and their configuration impact the detection overall performance of the device.
Motion planning system
ARIA is an item-oriented automobile control utility that has a programming library (SDK) for C++ programmers who need to access their P3-DX platform and add-ons. However, the automobile firmware does no longer carry out any high-level robotic responsibilities. As an alternative, it’s miles the activity of an clever purchaser walking on a connected pc to carry out this utility-level robotic control techniques and obligations, such as impediment detection and avoidance, localization, mapping, clever navigation and digicam manipulate. Indoor movement making plans of mobile robot deals with the troubles of localization, route making plans and the movement manage hows the motion making plans system used in this observe. Localization is the willpower of the positions of mobile robotic, boundaries and the target. Normally positions are given via a user or recognized by way of a digital camera. In the case of actual-time and dynamic working, consisting of moving obstacles or goals are used inside the environment, localization via a digital camera ought to be favored.
Because actual-time and dynamic packages are made in this study, a digital camera and photo processing techniques are used for localization. The digital camera is installed on the ceiling and it sends the actual-time pix of the surroundings to a pc. Each item is labeled with a extraordinary coloration on it; inexperienced for the boundaries, blue for the goal and yellow for the mobile robotic. So as to decide the heading angle of the mobile robotic, it’s also categorized with a purple color. Course of the road that connects the centers of yellow and purple colored circles at the robotic equals to the heading attitude of it.
Photograph processing program going for walks on the pc, which is written in MATLAB, takes the immediately pix from the digicam. The program determines the coordinates of each item which has a coloration extraordinary from the bottom color, as proven within the higher proper photograph of the figure. Coordinate willpower is a complex hassle, due to the fact the real environment and its picture do not overlap because of the path of the digital camera. Therefore, coordinate transformation must be done with the aid of the usage of corner coordinates of the real surroundings and the photo. At the closing, photo processing software suits the coordinates of colours with a grid based totally map, as proven at the lower proper picture. On this way, localization is found out and the map is produced. The second one step of the motion making plans device is to send the map to the path planning technique. On this have a look at, genetic set of rules is used to decide the route which mobile robotic goes via it. Course planning with the genetic set of rules is explained in detail inside the following phase. Within the last step, with the intention to manipulate the robot platform, a patron software, which is written in MATLAB, sends command packets thru the robotic connection. This may be finished the use of direct instructions. Direct commands encompass -byte packet header, one-byte byte count, one-byte command wide variety, one-byte argument type, n-byte argument and two-byte checksum, as described by way of the robotics’ running machine ARCOS. The direct command technique lets in sending any unusual or unique command immediately to the robot platform, without any intervening processing.
Path planning and optimization
Path making plans is a totally important task for the self -sustaining cell robotic. It is desired to discover a collision-loose motion in an obstacle inclined environment that allows you to navigate properly from the begin configuration to the aim configuration.
In lots of static and dynamic environments, cellular robots are more and more being hired. Typically, there are numerous possible paths for a robot to attain the goal from the begin region,
however in situation, the first-rate feasible route is decided on in line with some guiding principle such as shortest distance, smoothness of the route, minimum energy consumption and many others. Or the most followed standards are the shortest distance with the minimal possible time.
The path planning may be categorized into folds:
- Neighborhood direction making plans and,
- Worldwide direction making plans.
In neighborhood route making plans strategy, the robot has a restrained know-how (both in part-recognized or unknown) approximately the navigational environment. But, in worldwide course planning, the robotic has entire understanding approximately the navigational environment and thereby robotic can attain the goal by using following a predefined direction. However, worldwide direction planning techniques display constrained applications due to much less robustness in terrain uncertainty whereas, nearby route making plans techniques show greater flexibilities in partially known/unknown environments and presents an optimized course. It could be in addition categorized as classical technique and heuristic method (synthetic Intelligence method). The uses of cell robotic path making plans/arranging are included into restorative and surgical makes use of, person assist, safety, stockroom and move-ment packages, and moreover ocean and area investigation, robotized guided vehicles for shifting products in a plant, unmanned bomb switch robots, and planet investigation robots.
Addressing the Policy Issues Associated with Automated Dri-ving Systems (ADS)
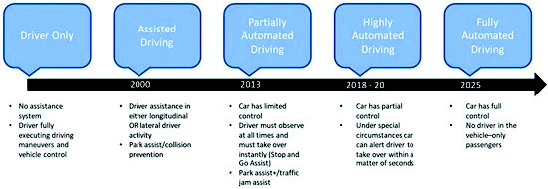
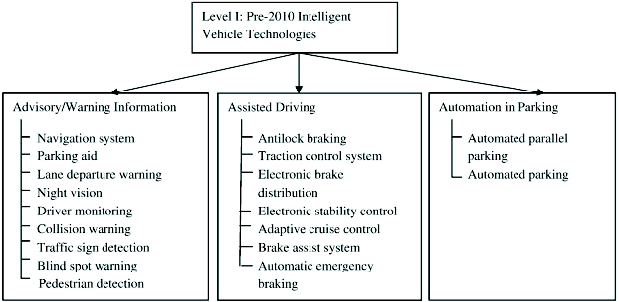
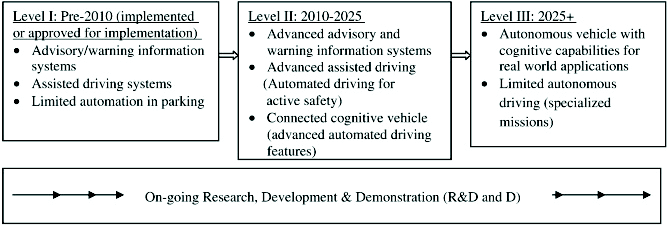
The convergence of records and communication technology (ICT) with automotive technology has already led to automation features in road vehicles and this fashion is expected to continue within the destiny owing to client call for, losing costs of additives, and stepped forward reliability. Even as the automation capabilities that have taken place thus far are specially in the form of data and driver warning technologies (labeled as level I pre-2010), destiny trends within the medium time period
(level II 2010–2025)are anticipated to exhibit connected cognitive car features and embody increasing degree of automation inside the shape of advanced driving force assistance systems. Although autonomous automobiles were developed for research functions and are being tested in managed riding missions, the independent using case is most effective a long term (degree III 2025 +) state of affairs. It’s on technological forecasts regarding automation, coverage challenges for each level of era improvement and alertness context, and the important device of fee-ef-fectiveness for coverage analysis which enables policy choices at the automation systems to be assessed in a regular and balanced way. The fee of a machine in keeping with car is considered against its effectiveness in meeting policy objectives of enhancing safety, performance, mobility, convenience and lowering environmental results. Instance programs are supplied that illustrate the contribution of the technique in supplying facts for helping coverage selections. Given the uncertainties in device costs in addition to effectiveness, the device for assessing policies for destiny generation features probabilistic and utility-theoretic analysis capability. The coverage problems described and the evaluation framework permit the decision of policy challenges while allowing worth revolutionary automation in driving to enhance future road transportation.
In recent years, fast trends in automobile technology have positioned public coverage in the capture-up mode. Advances in records and verbal exchange generation (ICT) have enabled the profession to go beyond the unique motive of the smart auto-mobile and toll road ma-chine (IVHS) initiative of many a long time ago and now we’re within the technology of developing era for related cognitive cars. Further, experimental independent vehicle era has these days been tested efficaciously. The development and the scenario of huge-unfold applications of more and more automated vehicles in public street networks pose coverage demanding situations. Despite the fact that an economically possible self-sustaining vehicle is not possibly to be within the marketplace for decades, self-sufficient using as a public coverage problem has already emerged.
Legal issues surrounding cyber security and privacy
Cyber security and facts safety are buzzwords in the meanwhile and for top motive. Banks and different financial estab-lishments face constantly evolving cyber threats. The nature of the threat and the means through which cyber attacks are perpetrated are developing ever more sophisticated and the capacity fallout from a main cyber protection breach may be big.
The branch for business and skills’ 2015 statistics protection Breaches survey observed that ninety percent of large firms had suffered a safety breach in the previous 12 months. The average price of the worst unmarried breach suffered by way of a big agency changed into a watch-watering £1.46m to £three.14m. Statistics protection breaches bring about loss of patron agree with, that can have an immediate impact on sales. However, the fees of a security breach will even include enterprise disruption costs, compensation bills and regulatory fines.
The survey also observed that the character of cyber attacks experienced by using establishments has shifted, with a decreased number of denial of service assaults and a growth in attacks regarding malicious software. Possibly especially with the developing awareness of cyber security risks, inadvertent human error turned into mentioned because the principal cause of the worst security breaches, up to 50 percentage from 31 percentage in the preceding year.
Felony requirements with regards to cyber protection in the U.K rise up commonly from the statistics safety Act 1998, which requires organizations to take “appropriate technical and organizational measures” to guard non-public facts from unauthorized get admission to, damage, loss or disclosure. Such measures need to ensure a degree of protection that is suitable, considering the harm that may be precipitated to people in the event of a facts security breach and the character of the information. While determining which safety features to install area, the Act in addition specifies that companies ought to keep in mind the kingdom of technological improvement and the fees of enforcing the measures.
Human factors of automated driving systems
Automated riding can essentially exchange road transportation and improve nice of exis-tence. However, at gift, the function of humans in automated automo-biles (AVs) isn’t always honestly established. Interviews had been conducted in April and might 2015 with twelve professional researchers inside the discipline of Human elements (HF) of computerized using to identify commonali-ties and exclusive views regarding HF challenges within the improvement of AVs. The experts indicated that an AV as much as SAE degree four have to tell its driver about the AV’s abilities and operational repute and ensure safety whilst converting between automated and manual modes. HF research should mainly address interactions between AVs, human drivers, and susceptible road users. Moreover, motive force education packages may additionally need to be modified to make sure that human beings are capable of the use of AVs. Subsequently, a mirrored image on the interviews is furnished, showing discordance among the interviewees’ statements—which seem like consistent with an extended records of work on human factors studies, and the speedy improvement of auto-mation era. We count on our angle to be instrumental for stakeholders worried in AV improvement and instructive to other parties. Automated using should essentially change road transportation and improve first-rate of lifestyles. But, the position of the human driver inside the computerized automobile isn’t always yet without a doubt established. This work affords the results of an interview examine among 12 HF scientists worried in automated driving studies. A consensus become revealed many of the researchers regarding the HF demanding situations that need to be resolved previous to the deployment of AVs on public roads. Such demanding situations consist of the synergy among the human driving force and auto-mation, capacity changes in driving behaviour due to automation, and the form of records that the human drivers will be receiving from the automatic riding device. Alternatively, a disparity was recognized between the researchers’ concerns regarding the AVs improvement and deployment and the AVs technological advances: even though the researchers expressed that AVs should no longer be delivered except proven secure, reality indicates that enterprise is now near the advent of level three and stage 4 AVs on public roads.
Autonomous Vehicle Applications
Automatic cars are an increasing number of present in modern-day society. Already, prototype motors had been automatic and judged dependable enough to force autonomously under widespread using situations. Beyond motors, there is a range of motors suitable for automation and throughout vehicle type there are not unusual hints recognized to standardize the procedure of making an autonomous car. In this text we overview what the commonplace elements are and illustrate with a few examples of automated floor vehicles developed with Freelance Robotics Pty Ltd.
Automatic motors
The DARPA urban project did provide an incentive in the quest towards a totally computerized vehicle. DARPA has been at once related to a success devel-opment of independent motors via many studies college groups in addition to private sector. Industrial availability of a completely automat zed car seems to be just around the corner. The remaining hurdles to business cognizance may be the important updates to road safety laws and, possibly greater tough to define, the overcoming of individual and network fears to accept as true with inside the wheels of an automated device on our roads. However, checks on present auto-mated vehicles are proving their reliability, with looking at outcomes higher than human judgments made on the road. Inside the cutting-edge marketplace, hooked up car agencies upload autonomous parts while they comply with the regulation. Common-place examples of this emergence of automation in industrial cars encompass automated parking, computerized correction of the automobile’s trajectory if the driving force crosses a continuous line, and alerts sounding to warn while other vehicles get too close.
Car automation in different fields
The enterprise of vehicle automation is a whole lot broader than business vehicle automation. Freelance Robotics has worked on automation throughout many types of motors. As an example, we’ve evolved automation components for farming cars together with irrigators, tractors, and buggies, mining automobiles inclusive of drilling rigs, and also industrial vehicles like forklifts and car crash checking out automobiles. Civil engineering is an extra place of utility, with a success robots having been evolved for pipes inspection. Within the wider context of the automatic marketplace, those applications are only a few examples. Given the ability range and utility of applications, automatic vehicles include a clear increase marketplace.
Landmark help in nearby positioning structures
Any other tool for automated car localization is the usage of landmarks. Landmarks can be natural or artificially delivered to the automobile’s environment.Whilst herbal, the vehicle identifies shapes which might be purported to be there, along with bushes, limitations, posts, et cetera normally herbal landmarks can be complicated to pick out, reducing machine reliability. For example, a tree can alternate form, or boundaries appear exceptional from distinctive angles. In evaluation, artificial landmarks provide a clean, steady way for the automated vehicle to become aware of its function. Examples of appropriate artificial landmarks encompass reflectors, RF IDS, bar codes, traces on the floor, panels with geometric shapes and colors, lighting, Wi-Fi, or IR beacons. When the automobile has correctly recognized positioning thru landmarks, it is able to update and music its position over time. In this way, dependable correction of positioning on its map turns into possible when the vehicle is a) in motion or b) moved in regarded surroundings.
Conclusion
New era cars have severe tendencies and car brands are in opposition. Due to this opposition, sensible motive force assistance systems are playing a key role at the same time as automobile enterprise is being more automated. Research shows that finding a solution to parallel parking is one of the maximum wanted enhancements for drivers. Because parking is a very difficult subject matter for novice drivers. In crowded cities this problem is getting larger due to the fact number of the automobile is increasing every day. [1] The purpose of the park assistant system is to assist the drivers have more fun and more efficient riding stories. Additionally, some other intention is decreasing damages for the duration of the parking operation. Parking damages have very horrific effect on international’s economic system. Due to the fact international locations and coverage organizations can pay cash for easy parking damages and proprietors of the cars’ sell their motors below its value due to harm records. Systems need ultrasonic sensors that placed on the corners of the automobile. These sensors wanted now not only for doing parking moves, however additionally scanning the park area. There are a few problems about ultrasonic sensors. For instance, thin objects are now not seen through these sensors and some environmental adjustments as temperature, pressure, humidity, air turbulence, airborne particles and so on. Effect on ultrasonic reaction. Despite those risks ultrasonic sensors are the most suitable sensor for these systems.
In this paper, we have discussed about machine learning in automobiles. This paper discussed about autonomous vehicle test and development, deep learning in Automobiles. In this paper we discussed about legal issues surrounding cyber security and privacy and autonomous Vehicle Applications also.
References
- Gang LH, Zhang MH, Zhang LF, et al. Automatic roadmarking recognition for intelligent vehicle systems appli-cation. Adv Mech Eng 2017; 9: 1–11.
- Wang B, Gao LJ and Juan ZC. A trip detection modelfor individual smart-phone-based GPS records with anovel evaluation method. Adv Mech Eng 2017; 9: 1–10.
- Zhou CR, Jia HF, Gao JX, et al. Travel mode detectionmethod based on big smartphone global positioning sys-tem tracking data. Adv Mech Eng 2017; 9: 1–10.
- Escobar C and Morales-Menendez R. Machine learningtechniques for quality control in high conformance man-ufac-turing environment. Adv Mech Eng 2018; 10: 1–16.
- Gao JJ, Xie YN, Gu F, et al. A hybrid optimizationapproach to forecast auto-mobile sales of China. AdvMech Eng 2017; 9: 1–10.
- Hu YW, Wang YP, Zhang JF, et al. Cor-relation degreeanalysis of arterial adja-cent intersections for coordinatedcontrol subunit partition. Adv Mech Eng 2018; 10: 1–12.
- Huang H, Tang QR, Zhang GC, et al. A novel approachto integrate potential field and interval type-2 fuzzylearning for the formation control of multiple AUVs.Adv Mech Eng 2017; 9: 1–11.
- Ji YF, Hu X, Jiang LY, et al. Algorithmic design andapplication of feedback con-trol for coiling temperature inhot strip mill. AdvMechEng2017; 9: 1–7.
- Men YZ, Yu HT and Yu HB. Development of blockloading spectrum for car power-train rig test correlatedwith customers’ usage. Adv Mech Eng 2017; 9: 1–10.
- Shen XP, Chen F, Su BJ, et al. Optimization of park-and-ride system: a case study of Shunyi in Beijing. AdvMech Eng
2017;9;1-8.
DOI
https://doi.org/10.57259/GRJ659
Research Objectives
– Innovation in current practices in auto-mobile sector
– How machine learning can enhance the applicability of the automobile sector
Bio

Academician, mentor, trainer and entrepreneur, MD porteight, Director strategic management, Mangalmay group of institutions, having strong credentials in rolling out innovative teaching methodologies, working for automation of logistics by enabling technology based things.